Final
project
Responding
to commands
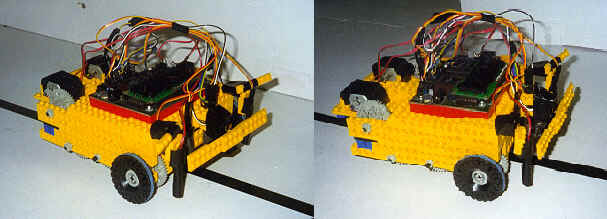
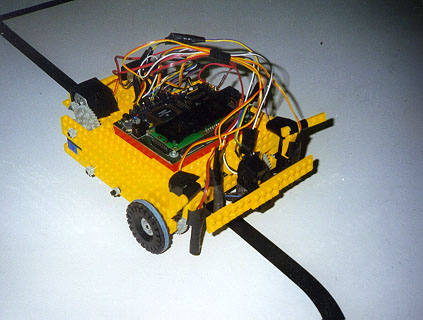 For this final project, two
infrared sensors were attached to the touch sensor on the front
of the robot. These sensors are similar to the photoresistors
used for following the line on the board, but return more
accurate readings. Their purpose is to make the robot able to
receive signals that it can then act upon.
For this final project, two
infrared sensors were attached to the touch sensor on the front
of the robot. These sensors are similar to the photoresistors
used for following the line on the board, but return more
accurate readings. Their purpose is to make the robot able to
receive signals that it can then act upon.
These signals were to be received from colored blocks found on the path of the robot as it moved through the maze. After finding one of these blocks, the wheels would be powered down and a reading of the color present on the blocks would be obtained. The robot would then interpret the color as a command. There were three different signals the robot was programmed to understand:
- Black: go to the ramp.
- Half black, half white: turn around.
- White: stop.
 This time, the robot moves randomly
through the maze, and it does not stop at the ramp, even if it
eventually happens to arrive at it. Only when it has been so
commanded, at any point in its trajectory, the robot seeks the
center of the ramp and stops there. Otherwise, it just moves
throughout the ramp, using the walls to guide its motion, since
there is no line on the ramp. After getting off the ramp, the
robot looks once again for the line and starts following it.
This time, the robot moves randomly
through the maze, and it does not stop at the ramp, even if it
eventually happens to arrive at it. Only when it has been so
commanded, at any point in its trajectory, the robot seeks the
center of the ramp and stops there. Otherwise, it just moves
throughout the ramp, using the walls to guide its motion, since
there is no line on the ramp. After getting off the ramp, the
robot looks once again for the line and starts following it.
For this last part of the project, the robot had to be trained to maneuver for longer distances on the ramp without the aid the black line provides. Before climbing each time, the robot attempts to adjust its trajectory to align as much as possible with the ramp, and then increases its speed to compensate for the incline. Once it has reached the center of the ramp, which is again flat, speed is decreased back, and the robot carefully moves forward sensing for the walls with its horns, until the change in color on the surface lets it know that the end of the ramp has been reached.
 The program reaches its end
when a completely white block is found along the way. The robot
stops, switches to stand-by mode, and signals the end of the
sequence with a beep. The onboard computer remains on until it is
turned off by hand. As long as the computer is on, the sequence
can always be initiated again by pressing the Start button.
The program reaches its end
when a completely white block is found along the way. The robot
stops, switches to stand-by mode, and signals the end of the
sequence with a beep. The onboard computer remains on until it is
turned off by hand. As long as the computer is on, the sequence
can always be initiated again by pressing the Start button.
The Interactive C code developed for this assignment is presented here.
Alejandro J. Trejo
University of Texas at El Paso
Last update: 09 Apr 1999.