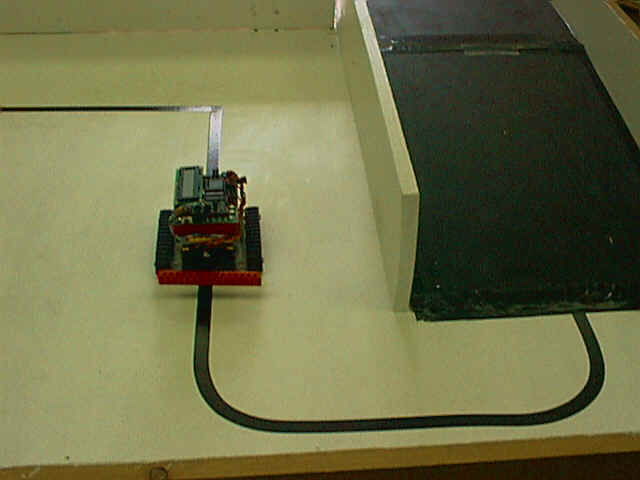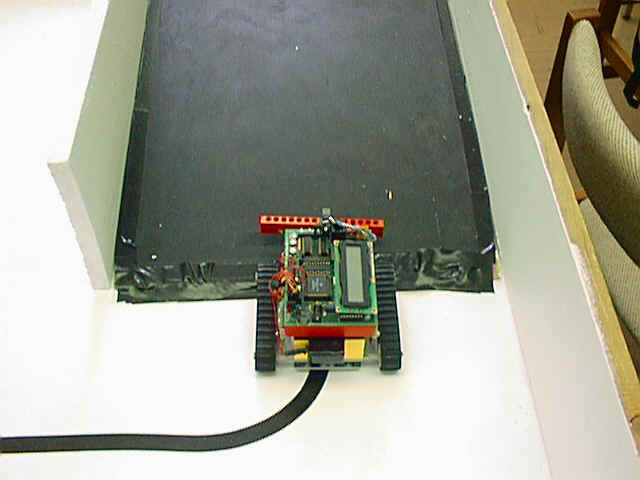
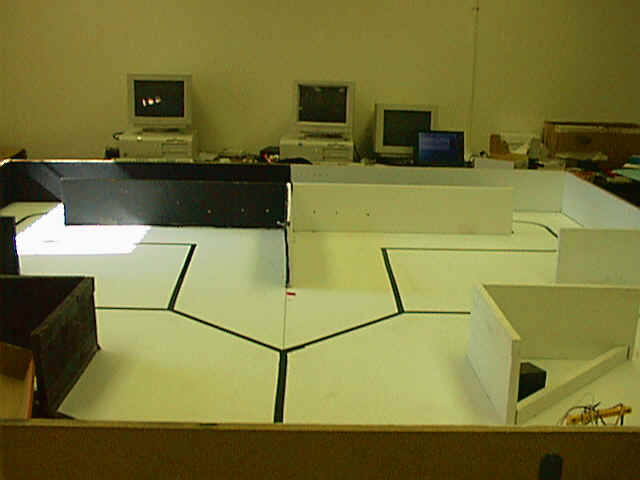
The P.O.J. programmable mobile robot is a small robot that was designed to perform an array of simple tasks. Behaving much like the proverbial white mouse in a maze that was sent to find cheese, this simple robot was placed in a maze and had to twist and turn its way to a predefined location, in this case a ramp at the top of the maze. The conditions of the task would gradually change, each time becoming more complex. At first the robot could be placed facing the ramp. The robot would then navigate its way to the top of the ramp from this point. The next approach asked for the robot to be faced in any direction at the bottom of the maze. After the robot was to detect where its position relative to the maze, it would then proceed to find a path that would take it to its destination. The final requirement of the robot was for it to find its way to the top of the ramp, after being faced in any direction at the bottom of the maze, and while avoiding any obstacles that it may encounter along its way. As a test of the robot's design, P.O.J. was asked to play a simple game of "hide and go seek".
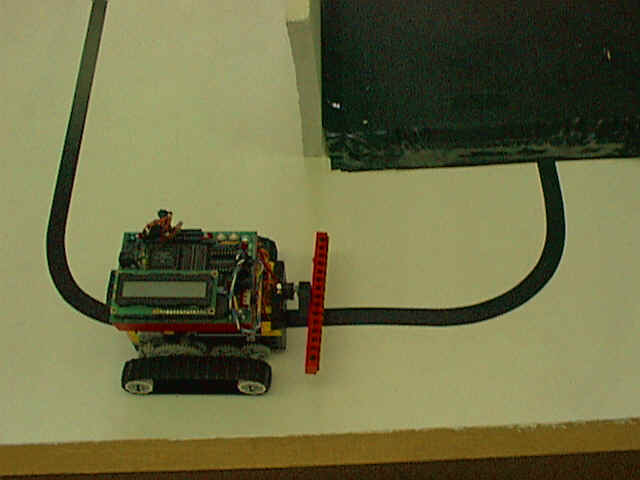
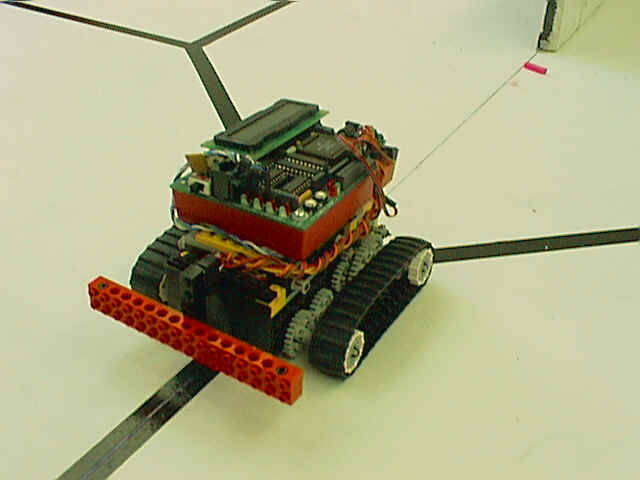
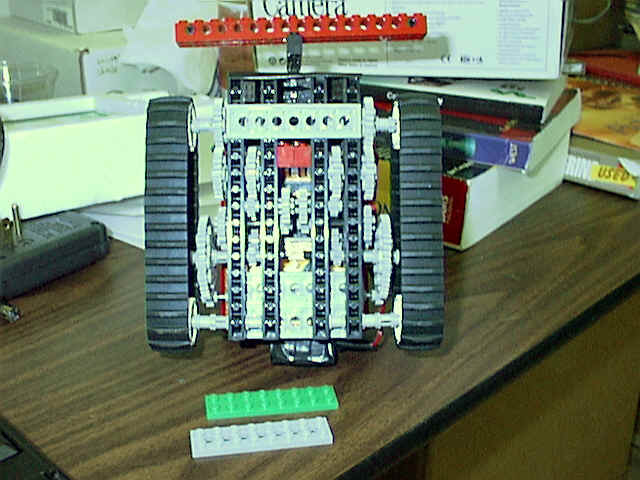
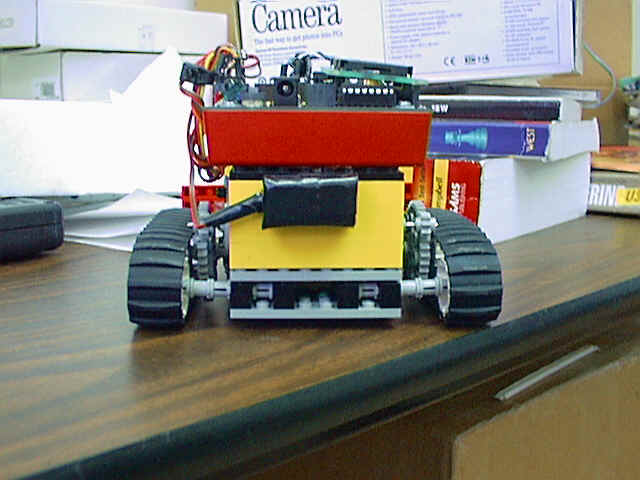
P.O.J. was designed with a minimalist approach to robotic architecture in mind. Standing approximately five inches tall and six inches in length, the small stature of the P.O.J. robot keep the robot simple and efficient. For locomotion, treads were outfitted to provide sure-footed traction and the precise movements necessary to navigate the maze. A series of gear reductions were applied that gave the small robot a compromise between speed and torque. All of this was housed in a sturdy and compact frame. The frame was designed to give a low center of gravity, which would aid the robot in traction as it attempted to climb the incline that was at the top of the maze.
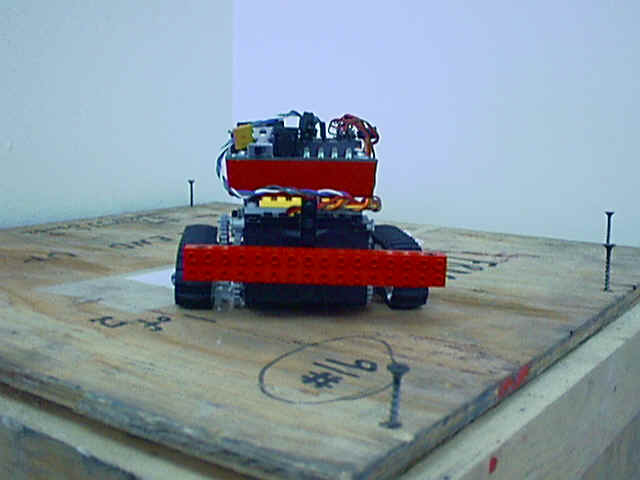


P.O.J. is equipped with a total of five sensors. Two infra-red sensors are located toward the front of the undercarriage of the robot. They are used to monitor any color changes that have occurred on the surface that the robot is travelling on. By evaluating these changes, the robot can then follow the black line that is on the maze by keeping the line in between the two sensors. A touch sensor fitted with a bumper was placed on the front of the robot. The purpose of this sensor is keep the robot navigating through the maze, even if it strays from the black line or has an obstacle in its path, by slightly changing directions if the sensor is activated. A photosensor was placed on the back of the robot to monitor any changes in color to the walls of the maze. By looking at the drastic black to white color changes that occurred on the walls, the robot could distinguish its location relative to a certain point on the maze. This sensor was essential in stopping the robot once it reached the top of the ramp.